Steigner (Martin Juříček) · GitHub
Par un écrivain mystérieux
Description

Training results of RL/DRL techniques using the environment to achieve

Results of RL/DRL learning techniques for the goal achievement experiment
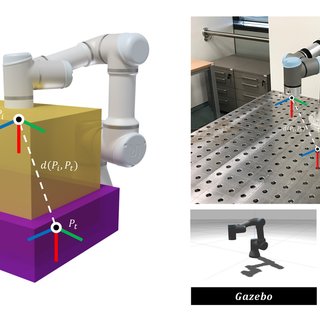
Experimental task aimed at achieving the goal using the UR3 robot. The

Nvidia Isaac Sim Universal Robots UR5e RTDE
Steigner (Martin Juříček) · GitHub

Learning environment of the UR3 model in the RVIZ simulation tool.
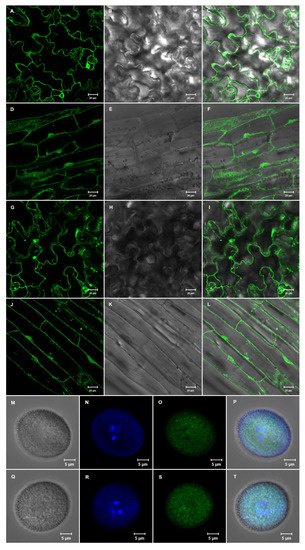
IJMS, Free Full-Text

PDF) A Robust Voice Pathology Detection System Based on the Combined BiLSTM–CNN Architecture

Test case of a robotic arm for the task of achieving a goal in a real

Basic structure of agent-environment interaction in Markov's

Schematic illustration of the proposed 2-DOF active end-effector with

PDF) A Robust Voice Pathology Detection System Based on the Combined BiLSTM–CNN Architecture
depuis
par adulte (le prix varie selon la taille du groupe)